
{kind=link}
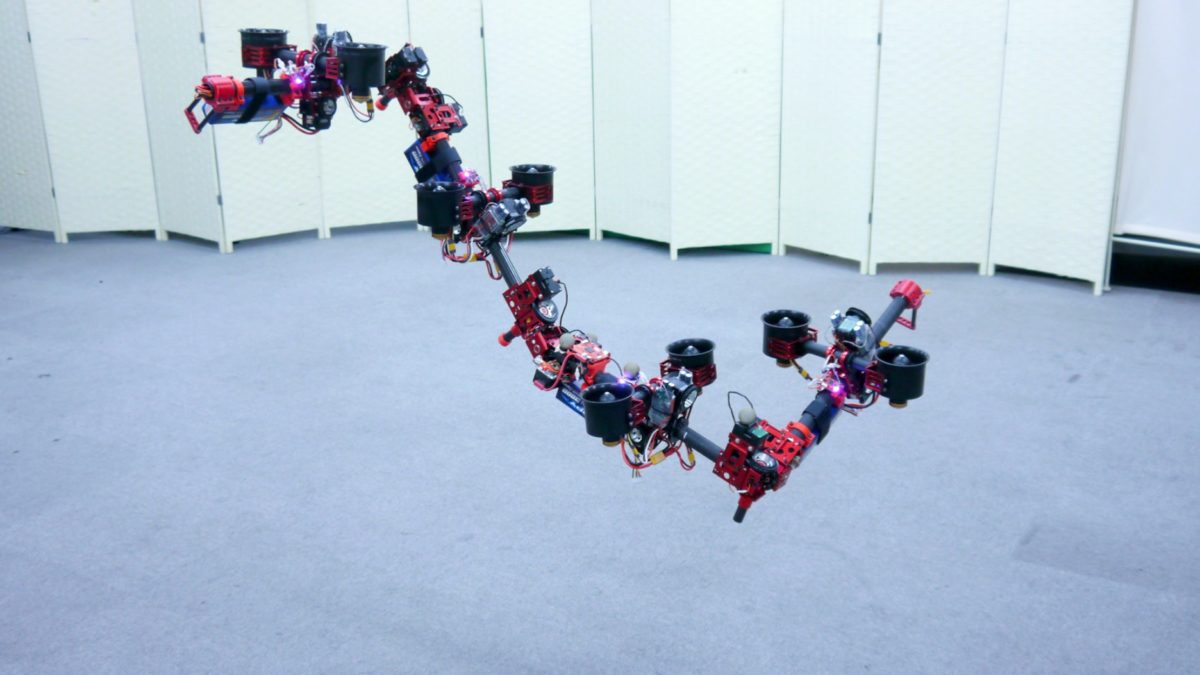
DRAGON can change its shape to move through complex environments and even manipulate objects

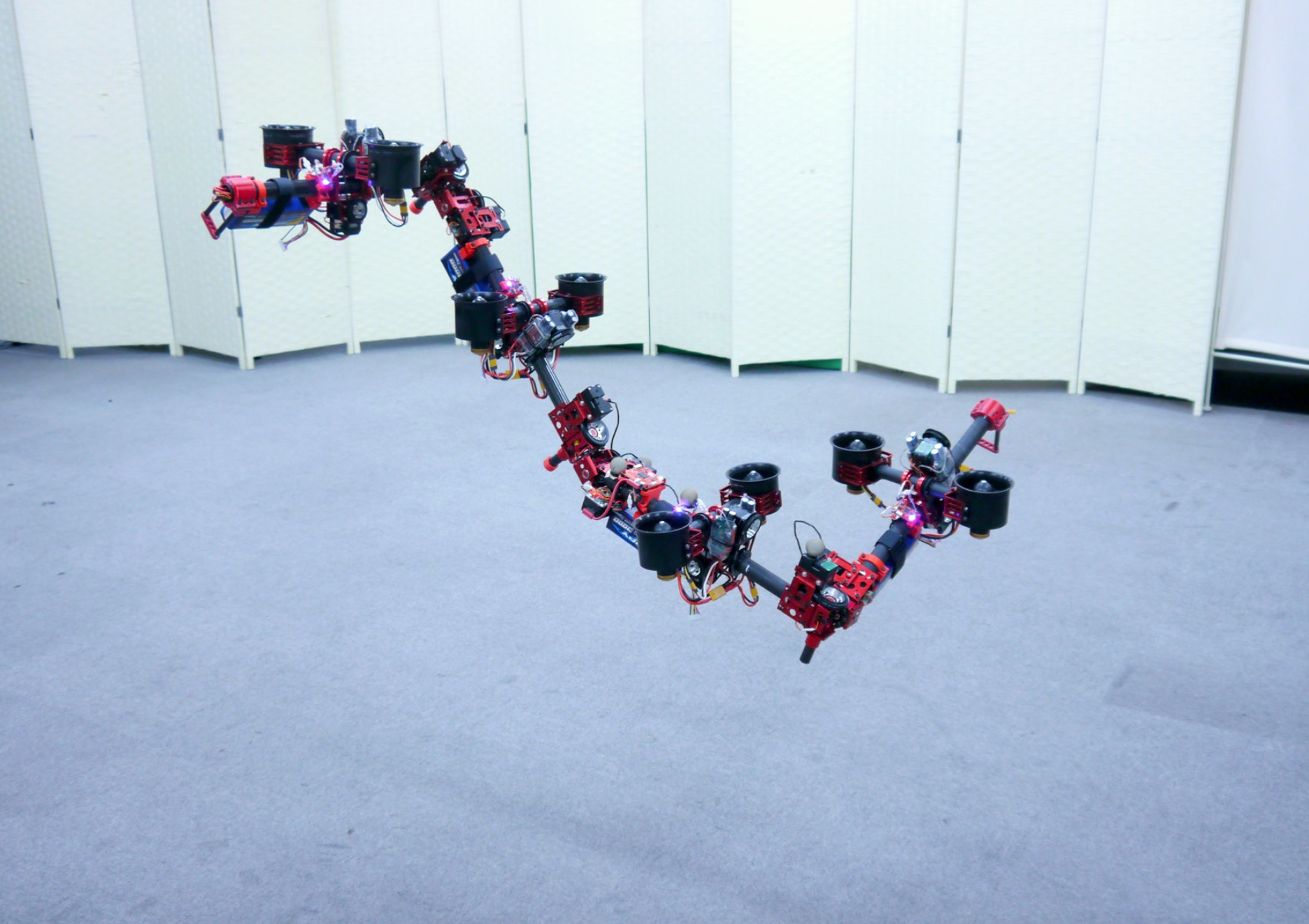
DRAGON is able to autonomously decide how to transform when given the constraints of the space it needs to pass through.
There’s been a lot of recent focus on applications for aerial robots, and one of the areas with the most potential is indoors. The thing about indoors is that by definition you have to go through doors to get there, and once you’re inside, there are all kinds of things that are horribly dangerous to aerial robots, like more doors, walls, windows, people, furniture, hanging plants, lampshades, and other aerial robots, inevitably followed by still more doors.
One solution is to make your robots super small, so that they can fit through small openings without running into something fragile and expensive, but then you’re stuck with small robots that can’t do a whole heck of a lot. Another solution is to put your robots in protective cages, but then you’re stuck with robots that can’t as easily interact with their environment, even if they want to. Ideally, you’d want a robot that doesn’t need that level of protection, that’s somehow large and powerful but also small and nimble at the same time.
At JSK Lab at the University of Tokyo, roboticists have developed a robot called DRAGON, which (obviously) stands for for “Dual-rotor embedded multilink Robot with the Ability of multi-deGree-of-freedom aerial transformatiON.” It’s a modular flying robot powered by ducted fans that can transform literally on the fly, from a square to a snake to anything in between, allowing it to stretch out to pass through small holes and then make whatever other shape you want once it’s on the other side.
DRAGON is made of a series of linked modules, each of which consists of a pair of ducted fan thrusters that can be actuated in roll and pitch to vector thrust in just about any direction you need. The modules are connected to one another with a powered hinged joint, and the whole robot is driven by an Intel Euclid and powered by a battery pack (providing 3 minutes of flight time, which is honestly more than I would have thought), mounted along the robot’s spine. This particular prototype is made up of four modules, allowing it to behave sort of like a quadrotor, even though I suppose technically it’s an octorotor.

The DRAGON prototype has four links (a) connected through joints (b) powered by servo motors. Each link carries a pair of ducted fan thrusters (c). A flight control unit (labeled “spinal”) with onboard IMU and Intel Euclid sits on the second link. Each link has a distributed control board (labeled “neuron”), with the ducted fan rotors controlled by electronic speed controllers (rotor ESC).
The paper presented at ICRA focused mostly on the fact that they managed to get this thing off the ground, in the air, and transforming a little bit (and there’s like four pages of math involved in that). DRAGON can fly as a straight line, as a box, as an “L” shape, and also has more complex 3D shapes like a zig-zag or a spiral.
What’s exciting, though, is why this robot was designed to transform in the first place. The video, which—spoiler alert—is actually a teaser for a 2018 IROS paper, shows the robot changing its shape in order to squeeze through a small gap, and we were told at ICRA that DRAGON is able to autonomously decide how to transform when given the constraints of the space it needs to pass through. There’s more potential here than just fitting through small spaces, though: The researchers conceptualize this robot as a sort of overactuated flying arm that can both form new shapes and use those shapes to interact with the world around it by manipulating objects. Eventually, DRAGON will wiggle through the air with as many as 12 interlinked modules, and it’ll use its two ends to pick up objects like a two-fingered gripper. And we can imagine DRAGON wrapping itself around stuff to move it, or using direct contact with the environment to do other exciting things.
Fan Shi, a JSK Labmember who contributed to this research (when he’s not helping us put together Video Friday, thanks Fan!) describes DRAGON as “a breakthrough in hardware design which, in a beautiful way, connects a manipulation arm with a ducted fan-driven aerial robot.” The robot seems to be “an ideal platform for aerial manipulation,” he adds, “and I really look forward to its further applications and research.” We’re looking forward to the same thing.
Social Media